Goal
To create the hardware prototype of a battery powered real-time location tracking device with a wireless transmission range of over a mile, and a battery-backup of 8 hours in a compact, IP-67 water-resistant form factor.
Timeline
Jan 2022 - May 2022
My Role
I take part in the selection of all the components. I am solely responsible to decide all the electrical connections and create all the electrical schematics. My responsibilities also include PCB designing for the device.
Working
The GPS sensor and the accelerometer on-board this system are responsible of deducing the location and orientation of the cargo. With the location and orientation the SOM can calculate the trajectory of the cargo and send this data to the ground team through the wireless commuication module.
Challenges
To provide an 8 hour long battery we have to use a 10000mAh battery pack. This increases the charge time to over 8 hours using wireless charging at a maximum current of 1.5A. To overcome this challenge I have designed a wired charging module. This module is capable of charging the batteries at 3.0A and reduces the charge time to 4 hours which is an acceptable amount of time.
Components Used
- SOM: Raspberry Pi Zero 2W
- Accelerometer: KXTJ3-1057
- GPS sensor: NEO M8N
- Wireless Communication: XBEE SX RF Module
- Wireless Battery Charger: TI BQ51050
- Wired Battery Charger: TI BQ25303
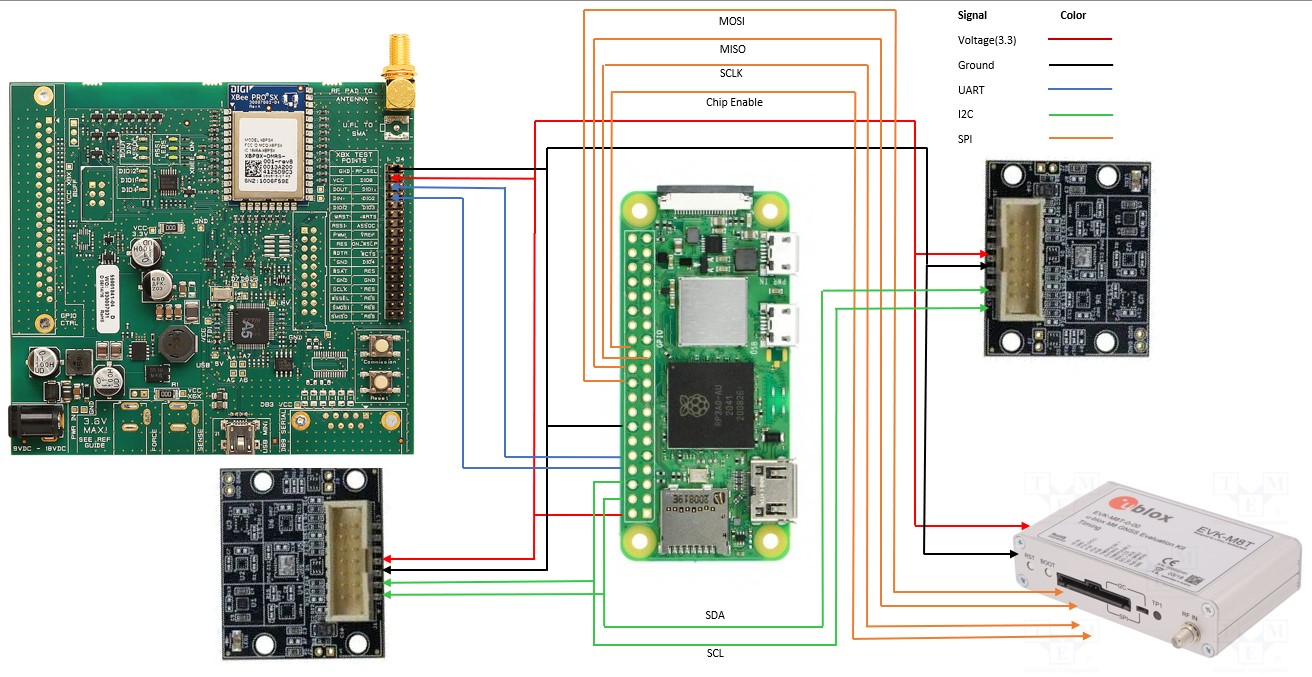
Figure 1: Electrical connections of the device sensors and SOM
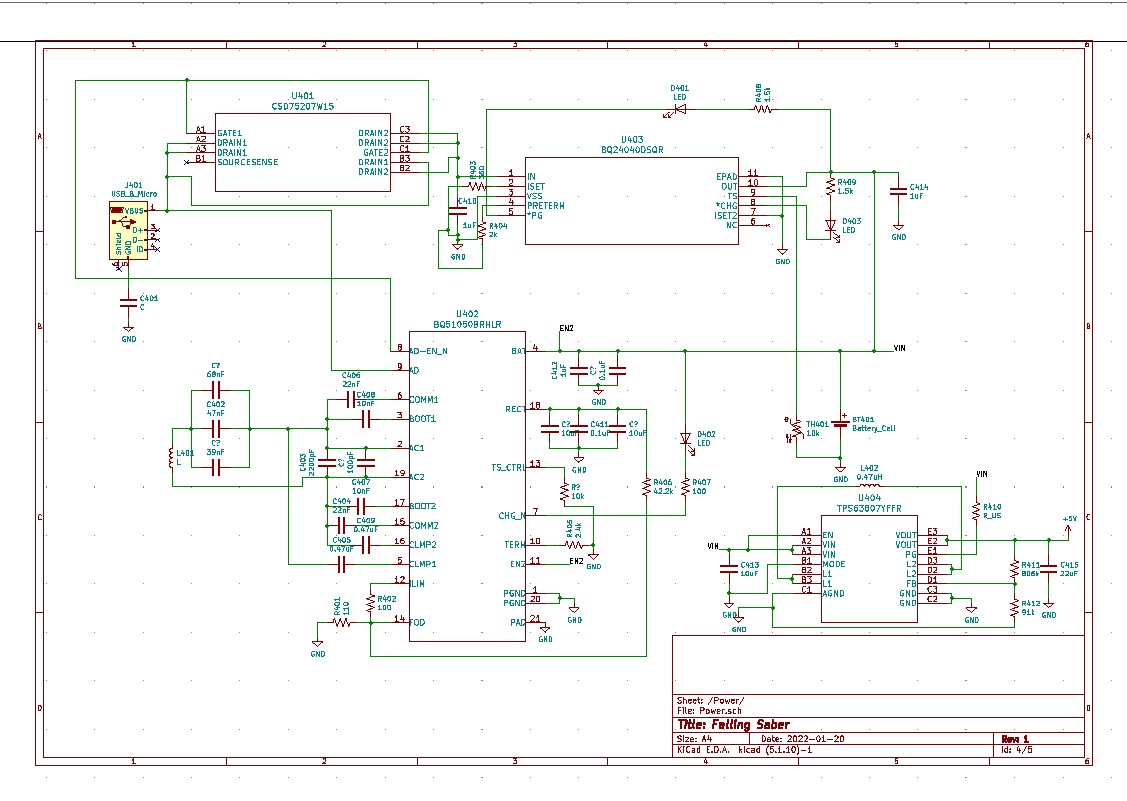
Figure 2: Wireless charging module for the device.